Космические аппараты ✺Системы малых космических аппаратов
Системы космических аппаратов
Какие системы входят во все космические аппараты. Общая информация
Устройства, используемые для изменения положения КА в пространстве
Система управления движением и навигации (СУДН) необходима, чтобы КА находился в определённом положении при движении по орбите, также она позволяет ему перемещаться в пространстве и поддерживать нужные параметры орбиты (орбита спутников постоянно снижается за счёт торможения об атмосферу Земли).
Исходя из вышесказанного, можно выделить два основных назначения СУДН:

Основной навигационной задачей является расчёт (или измерение) навигационных параметров (координат и скорости), характеризующих орбиту космического аппарата. Другими словами, необходимо понимать, где в конкретный момент времени находится КА. Для этого в составе СУДН есть аппаратура спутниковой навигации, обменивающаяся сигналами со спутниковой группировкой. Также задача навигации решается расчётным путём средствами бортовой вычислительной системы (БВС).
В задачу наведения входит расчёт необходимых управляющих воздействий, которые обеспечивают приведение КА в заданную точку космического пространства или поверхности небесного тела с заданной скоростью и в требуемый момент времени. Все расчётные задачи в автоматическом режиме также решает БВС, а исполнительным органом является двигательная установка.
Зачастую важно обеспечить ориентацию КА относительно окружающего пространства и, что еще важнее, объекта исследования (куда «смотрит» телескоп или как наведена антенна и т.п.). Сначала узнают текущую ориентацию. Для этого используются различные приборы определения координат (солнечные, звёздные и инфракрасные датчики, магнитометры). А затем с помощью двигательной установки и/или силовых гироскопов (маховиков) аппарат поворачивают в необходимое положение.
Чтобы поддерживать требуемую ориентацию, нужно решить задачу стабилизации. Другими словами - устранить угловые отклонения, возникающие под воздействием внешних сил. Поддержание заданной ориентации (создание управляющих моментов относительно центра масс) обеспечивают специальные двигатели ориентации, а также силовые гироскопы.
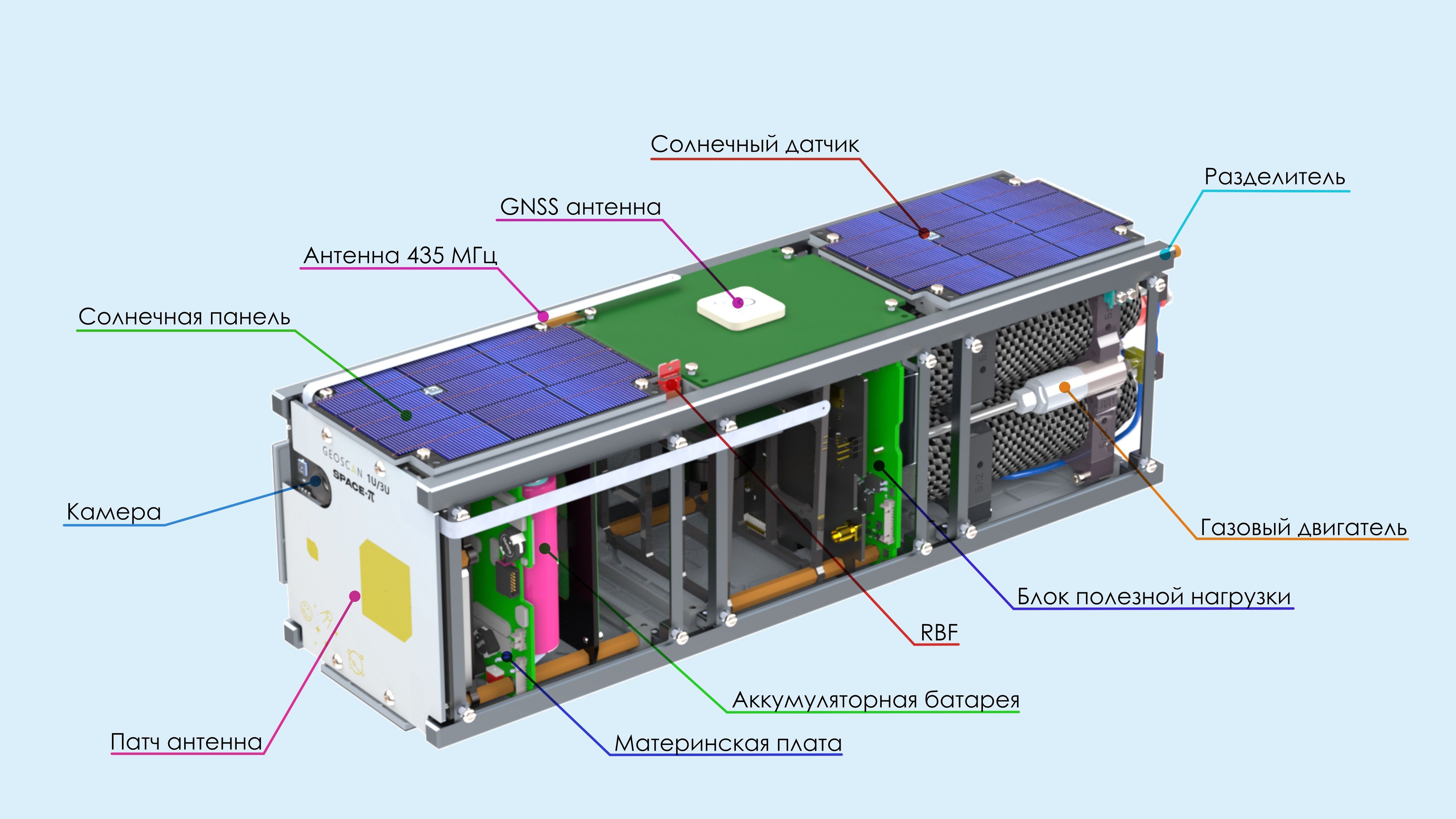
Как правило CubeSat не оснащены двигателями и имеют лишь систему ориентации и стабилизации (СОС), которая решает свои задачи с использованием гироскопов, в качестве которых часто применяются маховики.
Один маховик позволяет повернуть аппарат относительно одной оси. Поэтому необходимо использовать блок как минимум из трёх маховиков для управления положением по всем осям. Чаще всего в задачу ориентации CubeSat не входит необходимость вращения вокруг своей оси, поэтому используется блок из двух дублированных маховиков. Такие блоки входят в состав CubeSat класса 3U и выше.

Для ориентации строго по одной оси могут использоваться гравитационные штанги с грузом на конце. Идея состоит в том, что более тяжелый груз будет сильнее притягиваться к Земле, чем сам спутник, обеспечивая стабильное положение оси, направленной к центру Земли.
Маховики и штанги не используют топливо (рабочее тело), из-за чего двигательные установки им проигрывают.
Также в состав СОС кубсата входят датчики, обычно солнечные, но могут быть и магнитометры, и звездные трекеры, а также их совокупность для надёжности.
И все же задача поддерживать и менять орбиту довольно важная. Поэтому для спутников формата CubeSat (3U и более) активно разрабатываются двигательные установки.
Проблемой наноспутников является тот факт, что они, окончив свою работу (или выйдя из строя), продолжают пребывание на орбите еще несколько лет и могут сталкиваться с другими аппаратами. Наличие двигателя может решить эту проблему. После окончания срока службы двигатель выдаёт тормозной импульс и кубсат сгорает в атмосфере.
Наибольшее распространение на кубсатах получили газовые и электрические (ионные, плазменные) двигатели, также разрабатываются идеи кубсатов с солнечным парусом.
Какие системы входят во все космические аппараты. Общая информация

Каким образом космические аппараты получают электрическую энергию для работы?

Способы регулирования температуры на борту космического аппарата
Какие устройства использует спутник для сообщения с Землёй?
Какие требования предъявляют к управляющим системам спутника?
Важный элемент в составе КА, без которого невозможно обойтись
Мы будем писать вам только когда появится что-то интересное,
никакого космического мусора