Лобачевский
Спутник нижегородского Университета Лобачевского стандарта CubeSat 16U, предназначенный для агроэкологических исследований в различных регионах страны
Аппарат для исследования вибротермического отклика корпуса в условиях космического полёта
| Название КА | КузГТУ-1 |
|---|---|
| NORAD ID | 57217 |
| Наблюдение за спутником | СОНИКС, SatNOGS, «ЭФИР» |
| Номер в Регистре РФ | 3646-2023-009 |
| Позывной | RS47S |
| Частоты | 437,100 МГц |
| Размер | 3U |
| Масса | 3,4 кг |
| Полезная нагрузка | – плата управления полезной нагрузкой; – три датчика вибрации (Глобалтест AP2037-500); – электромеханический эмулятор детали с внутренними напряжениями (ЭМЭДВН) |
| Назначение | формирование физико-математических научных групп и подходов в проектировании малых космических аппаратов |
| Платформа | ООО «СПУТНИКС» |
| Запуск | 27.06.23, космодром «Восточный» |
| Орбита | ССО, наклонение 97,6° |
| Ракета-носитель | Союз-2.1б с РБ «Фрегат» |
| Статус | активен |
Второй спутник Кузбасского государственного технического университета им. Т. Ф. Горбачёва в рамках проекта Space-π.
Полезная нагрузка (ПН) МКА состоит из платы управления ПН, трёх датчиков вибрации (Глобалтест AP2037-500), расположенных во взаимно перпендикулярных ориентациях на раме МКА, и электромеханического эмулятора детали с внутренними напряжениями (ЭМЭДВН).
Плата управления обеспечивает двунаправленную передачу данных между платформой Sputnix CubeSat (SXC) «ОрбиКрафт-Про» и полезной нагрузкой МКА.
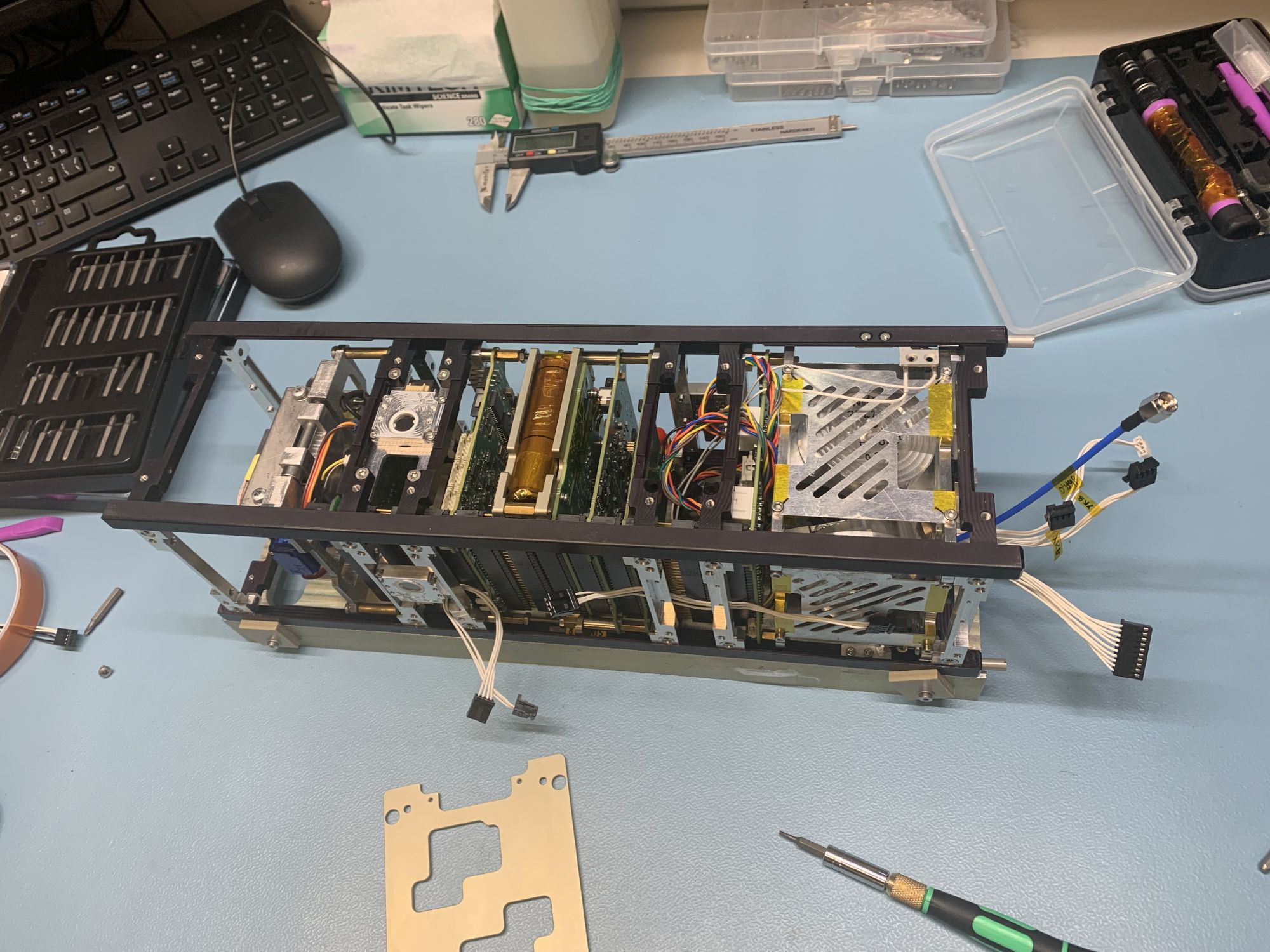
Электромеханический эмулятор детали с внутренними напряжениями представляет собой опору и подвижный элемент в виде упругой балки, один конец которой имеет шарнирное закрепление, а второй конец подвижен и может упираться в упор. Перемещение подвижного элемента осуществляется шаговым микродвигателем с редуктором. На подвижном элементе так же закреплён тензодатчик для контроля уровня внутренних напряжений в ЭМЭДВН. Модель и параметры шагового двигателя и тензодатчика должны быть согласованы на этапе разработки Платы управления.
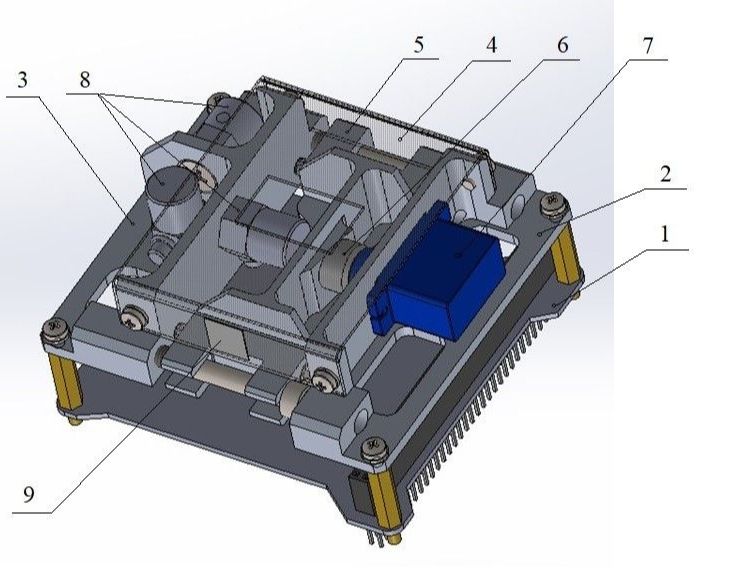
Плата управления (поз. 1) служит для приёма и передачи информации от датчиков полезной нагрузки (поз. 8 и 9) и управления электромеханическим исполнительным устройством ПН (поз. 7).
Электромеханическое исполнительное устройство представлено подпружиненным суппортом (поз. 5), сервоприводом (поз. 7) и эксцентриком (поз. 6).
Задачей электромеханического исполнительного устройства является создание управляемого напряжённо-деформируемого состояния в системе, с целью исследования его влияния на диссипативные параметры материалов и конструкции малых космических аппаратов.
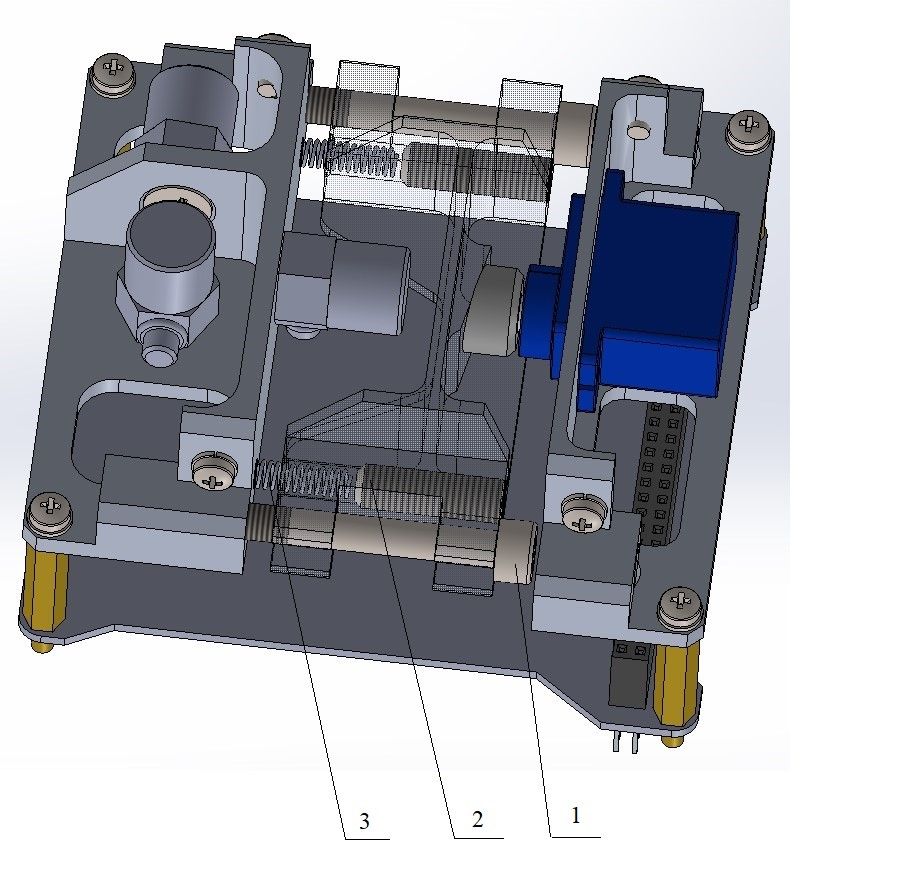
Предварительная регулировка жёсткости суппорта осуществляется винтом (поз. 2; рис 2).
Датчик деформации (поз. 9; рис. 1) предназначен в качестве обратной связи и фиксации параметров напряжённо-деформируемого состояния в системы во время работы в невесомости.

Обработкой данных будут заниматься сотрудники центра управления полётами КузГТУ и студенты направлений подготовки «Электроника и наноэлектроника», «Автоматизация в энергетике», «Электроснабжение», а также заинтересованные школьники.
Спутник нижегородского Университета Лобачевского стандарта CubeSat 16U, предназначенный для агроэкологических исследований в различных регионах страны
МКА для изучения радиационной обстановки на полярной солнечно-синхронной орбите с помощью разработанных в НИИЯФ МГУ детекторов космической радиации
Малый космический аппарат Санкт-Петербургского политехнического университета Петра Великого для ДЗЗ в радиочастотном диапазоне и приёма сигналов AIS
Спутник Самарского национального исследовательского университета имени академика С. П. Королёва с радиолокационной съёмочной аппаратурой
Наноспутник Президентского физико-математического лицея № 239 и Лицея «Физико-техническая школа имени Ж. И. Алфёрова»
Малый космический аппарат Научно-исследовательского института ядерной физики имени Д. В. Скобельцына Московского государственного университета имени М. В. Ломоносова для радиационного мониторинга околоземного космического пространства
Радиолюбительский спутник для экспериментов с технологией IoT (интернет вещей) и для испытания перовскитных солнечных элементов
Спутник Самарского национального исследовательского университета имени академика С. П. Королёва с гиперспектрометром